Theohand is a prosthetic device that utilizes soft robotics to help our Project Partner Theo improve his mobility and way of life. Theo is a 3 year old boy born with a birth defect called Amelia. In Theo’s case, he was born with only one-third of his right forearm. We aimed to create an intuitive device that enabled him to do his favorite hobbies, such as bike riding and drawing,much more easily. Because of Theo’s young age and lack of experience with prostheses, the user experience of the device was a huge priority. With the Theohand, we explore the intersection of cutting edge prosthesis technology with human-centered design, creating a device that provides greater mobility but also enjoyment in Theo’s life.

In a team of four,consisting of all mechanical engineering students, we worked on the entire design process to create a fully functional final prototype. I worked on needfinding, ideation and prototyping, user testing,mechanical and visual design.I implemented human centered design methodology that began with extensive one-on-one user interviews throughout the product’s iterations. I designed , modeled , and manufactured soft robotic fingers that aided to conform to a variety of objects and reduce stiffness at the initial turn for a child and designed the arm housing for comfort and minimize weight and bulk.

Design and manufacture a prosthetic for Theo, a 3-year-old boy born with a ⅓ of his forearm. The prosthetic should seek to improve Theo’s life and allow him to achieve tasks that would otherwise be difficult for him. To create an authentic prosthetic, we would have to work closely with our project partners through extensive user interviews and three user testing meetings. The prosthetic should also be able to pass a series of dexterity tasks and include electronic and mechanical components.
In order to design an authentic product that truly reflected Theo’s needs as a child and first-time prosthesis user, the user experience was a huge priority and guided our major design decisions. Theo’s young age, being 3 years old, provided a challenge for us in determining our needfinding and user interviews. We interviewed Theo’s father as someone who knows Theo and has his best interests first. Our goals for our user interviews were to understand Theo’s challenges with everyday tasks, grasp a sense of his personality including likes and hobbies, and family values.
In addition to user interviews, we conducted secondary research on existing prosthesis technology. Some products include the TBM hand, a child prosthetic hand that focus on making the fingers flex inwardly independently of each other, iron man hand, a child prosthetic focus on creating a playful interactive hand , and open source 3D printed prosthetic arms.
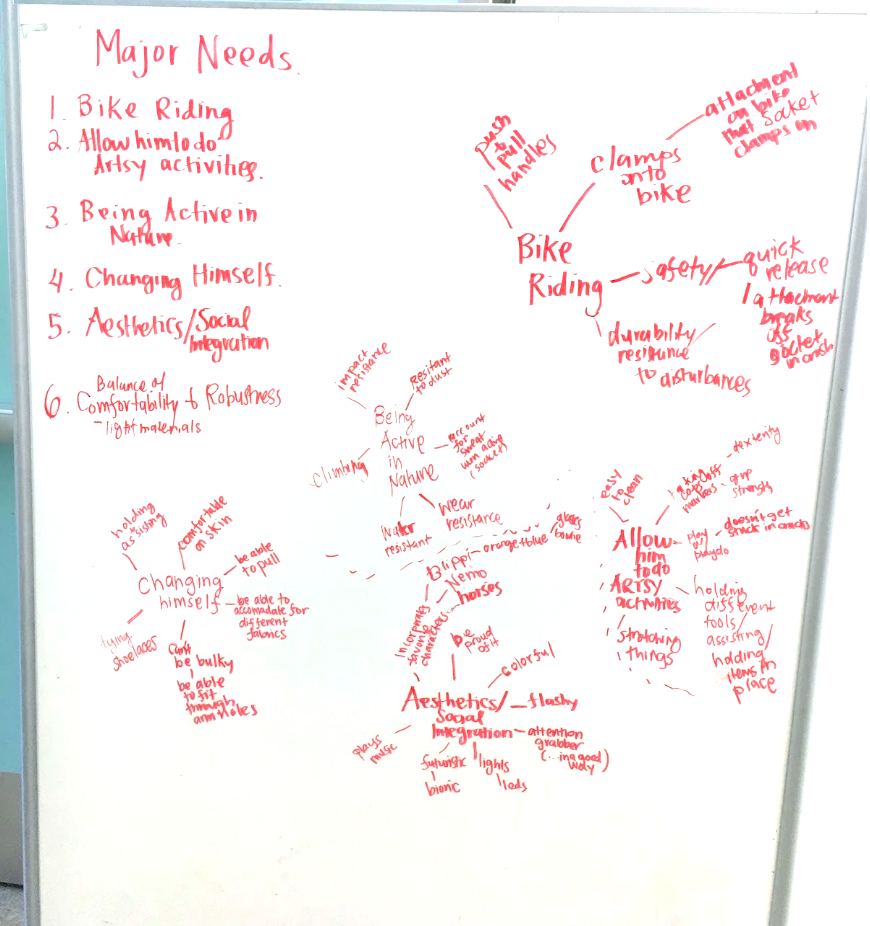
(1) Mind map based on major needs/key insights from our interview and explored each on solutions and further explorations while maintaining an empathetic outlook to our ideas.
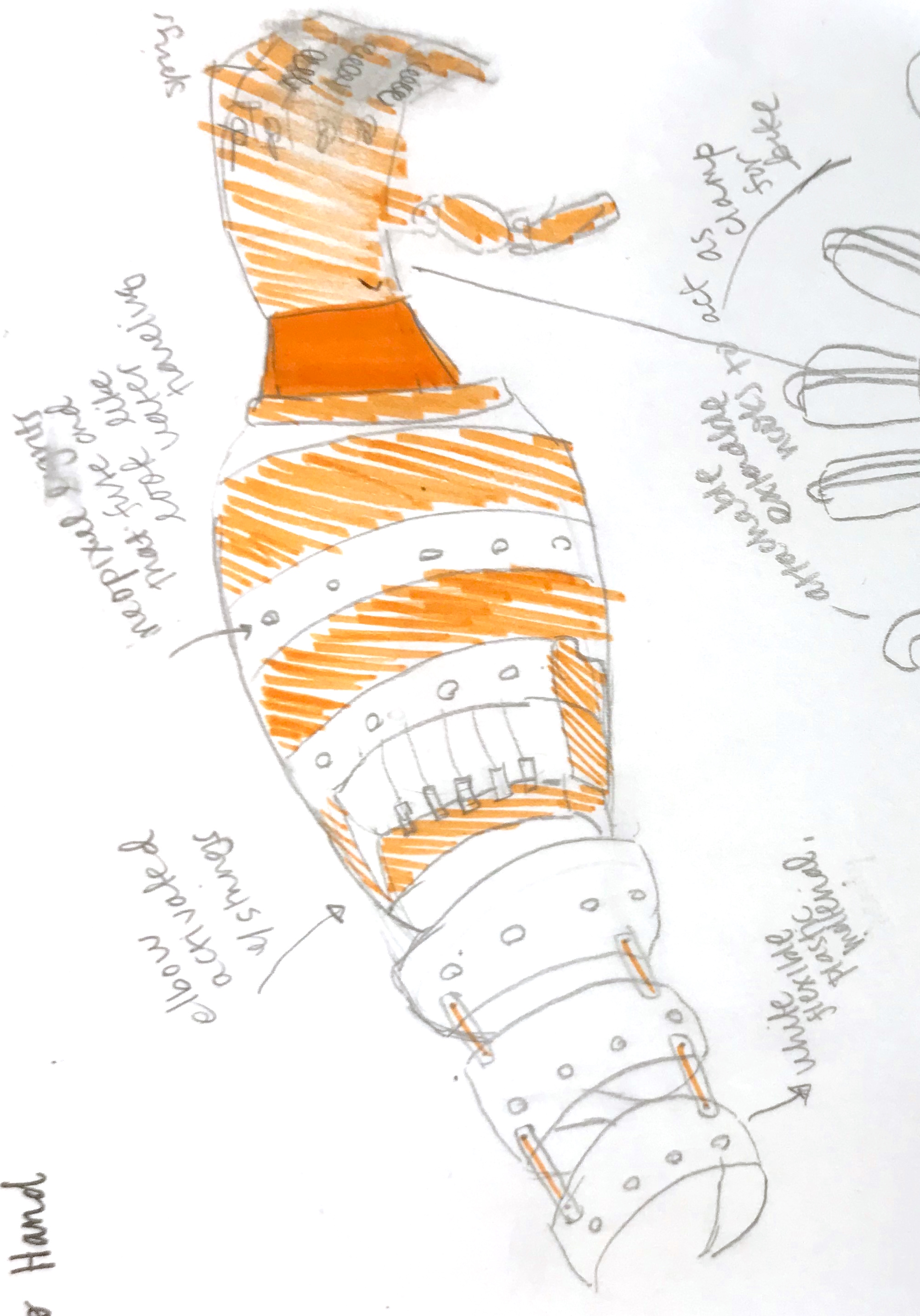
(2) We then individually sketched out ideas for prosthetics taking inspiration from our secondary research,detailing the ideal mechanism whilst addressing the major needs of Theo.
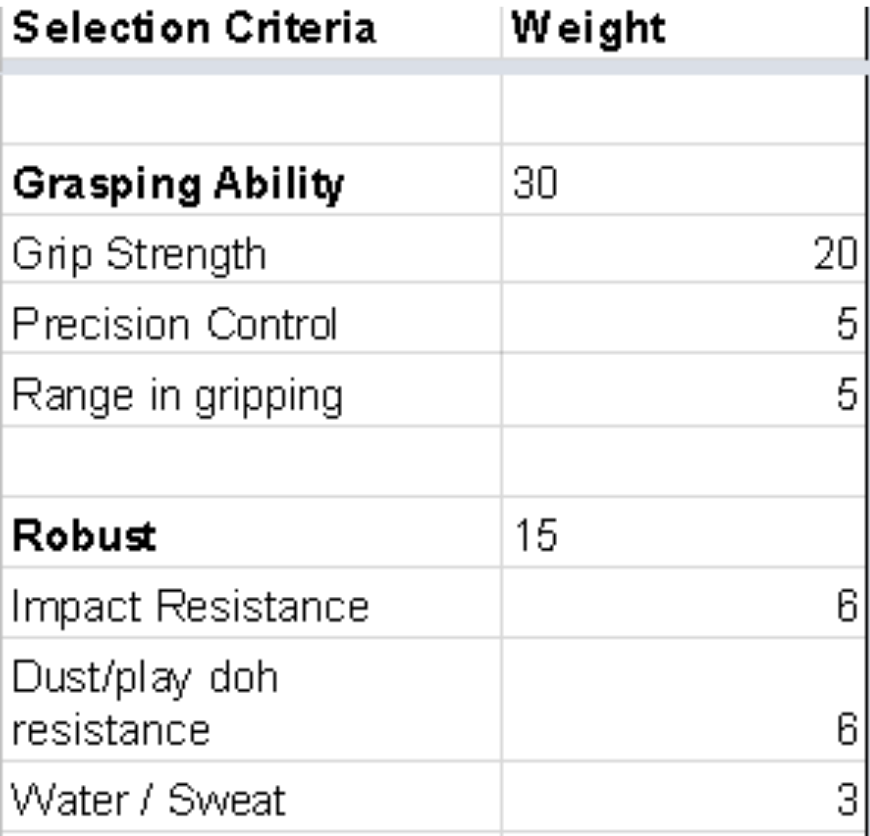
(3) Combined ideas then agreed on a design we wanted to move forward with based on a PUGH CHART?We functionality such as grasp strength and robustness as well as look and feel.

The focus of our product was to create a design that was easy and simple for Theo and any other younger child to use. This would serve as an introductory prosthetic and something for him to adapt to. Our three meetings with Theo influenced our iterations.


During our first meeting with Theo, our main goals were for Theo to experience our main mechanism, the knob mechanism, and to see the socket fitting for Theo and gage his arm size. This was Theo’s first attempt and found it difficult at first but was able to adapt and learn quickly the turning mechanism. An improvement we made was to create a star knob so it would be easier for Theo fingers to hold. As for fit, although we had an arm casting, Theo proved to be a lot smaller, so we downsized our socket by a lot.


For our second meeting, we had a functional prototype for Theo to try. Our main goals were to see fit and comfort, his response to the turn and release mechanism, and whether he could grasp an object. Theo was not able to grasp smaller items such as markers but could grasp larger objects. To address this for our next iterations, we made the tendon system more taught as well as an added plastic dip to fingers, palm and thumb for more friction. Theo was able to pick up on moving very quickly and it was easy for him to do full turns. He enjoyed playing with the star knob. This is attributed to the device feel more like a toy. Kids are usually drawn to a simple mechanism such as turning and toys exist on the market specifically targeting these mechanisms already. However, he still doesn’t turn the knob the full way to where there is a full grasp but rather turns and then releases. Our next iteration for meeting 3 would integrate electronics, an FSR and LED feedback that signifies a full grasp with and this may help with these processes.


The final iteration for Theo to try on was during Jacob’s showcase. In this iteration, we had implemented the electronics and wanted to see his response to the prosthetic in terms of ease of use of mechanism, functionality, comfort, and inclusion of electronics. Overall, Theo appeared to really like the party mode and the simplicity of pressing a simple button to actuate it. The Led party mode, the star knob mechanism, and Baymax aesthetic emphasized the toy-like prosthetic suitable for a young child. We wanted this to be an arm that would be cool to look at and play with. Further improvements include fixing bulkiness, ensuring a more secure fit, and a better fsr placement.